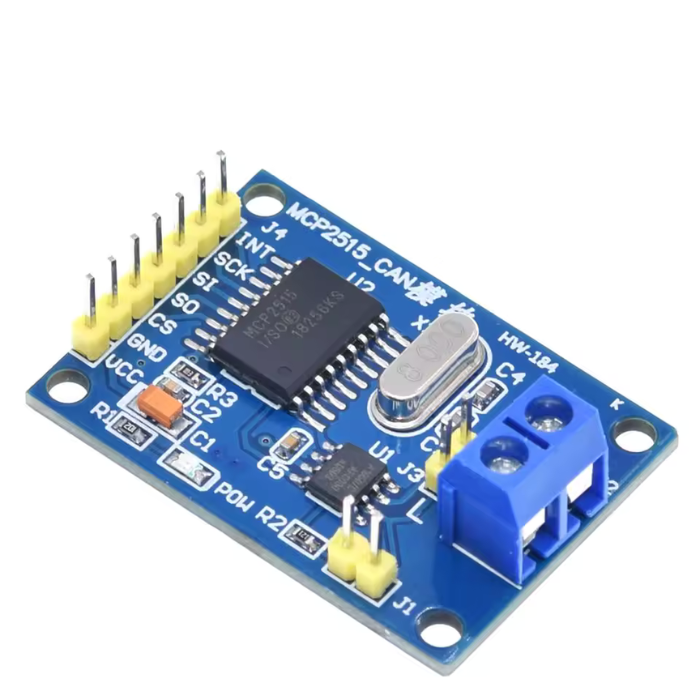
Módulo CAN Bus MCP2515 con transceptor TJA1050 SPI
Descripción completa del producto
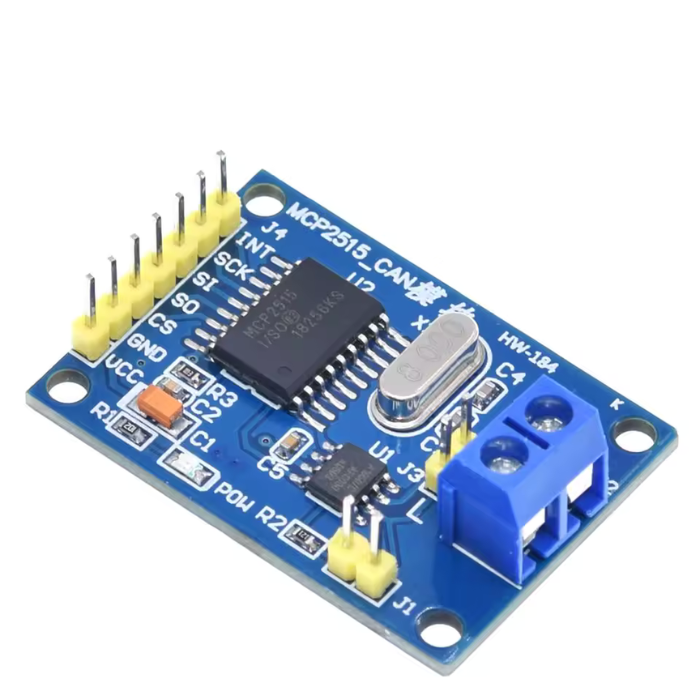
Módulo de comunicación CAN Bus basado en el controlador MCP2515 y el transceptor TJA1050, diseñado para permitir la conexión entre microcontroladores (Arduino, ESP32, STM32, etc.) y redes CAN.
Se comunica mediante interfaz SPI, lo que facilita su integración en proyectos de robótica, sistemas automotrices, control industrial y dispositivos IoT que requieran comunicación en buses CAN estándar.
Características eléctricas:
Controlador: MCP2515 (interfaz SPI).
Transceptor: TJA1050 (interfaz física CAN).
Voltaje de operación: 5 V DC.
Interfaz con microcontrolador: SPI (CS, SCK, SI, SO, INT).
Velocidad de comunicación CAN: hasta 1 Mb/s.
Compatible con: Arduino, ESP32, STM32, Raspberry Pi, entre otros.
Oscilador de 8 MHz para sincronización precisa.
Dimensiones:
Largo: 42 mm
Ancho: 28 mm
Altura: 13 mm (incluyendo pines y bornera).